Sommaire:
Introduction
Etude de l'existant
Analyse fonctionnelle
- Diagramme bête à cornes
- Diagramme pieuvre
Développement et description du mécanisme
Evolution du prototype et problèmes rencontrés
Conclusion
Introduction
Système d’aide à la préhension d’objet bon marché, dit "exosquelette pour main lowcost"
Aujourd’hui, de plus en plus de personnes éprouvent des difficultés musculaires, en particulier aux mains (saisir des objets, porter des charges lourdes). En effet, la population mondiale subissant un important phénomène démographique de vieillissement, notamment dans nos sociétés développées, le problème de palier à ces situations se pose. L’enjeu est ici de type techno-sociétal.
Ce système permettra donc à un utilisateur ayant des difficultés (partielles ou totales) musculaires au niveau de sa main de saisir des objets necessaires à son quotidien. Il s’agit ici d’un système de soutien et non de remplacement (prothèse). La finalité est ici d’aider une personne à saisir / porter un objet moyen commun pour faciliter son quotidien, type verre à eau, téléphone etc.
Dans le cadre d’une production à l’échelle du FabLab, les contraintes de réaliser prototype partiel ou complet, avec les moyens de l'INSA et du temps limité par le format de projet semestriel. Les logiciels de bureautique, modélisation, simulation tels que Autodesk Inventor et Créo, le matériel à disposition au FabLab et à la PFM pour impression 3D / découpe laser seront sollicités.
Etude de l'existant:
| Nom | Image | Descriptif | Prix |
Bras robotique DIY 5DOF |
 |
Exosquelette non rattaché à la main pouvant s'ouvrir et se fermer grâce un système électrique | 81.55 € |
| SaeboGlove |  |
Aide à la préhension. Gant confortable en latex qui remplit bien la fonction étudiée. Prix cependant élevé | 269 € |
| Pince de préhension aimantée |  |
Permet de saisir des objets éloignés plus facilement. N'est pas utile pour manier les objets (stylos, tasse...) | 28.29€ |
| Objets spécifiques d'aide à la préhension (ici, un stylo à rhumatisme et un bracelet métacarpien) |
|
Le bracelet métacarptien permet de tenir en main une cuillère sans exercer de force. Le stylo à rhumatisme permet d'écrire sans appuyer. Ces deux systèmes répondent bien au besoin étudié mais ne permettent pas de saisir d'autres objets. |
Bracelet métacarpien: 17.90€ Stylo pour rhumatisme: 5.90€ |


On remarque qu'il n'existe pas d'exosquelette lowcost remplissant la fonction étudiée. Cependant, on constate qu'il existe réellement un besoin, car il existe d'autres systèmes de préhension sur le marché (bracelet métacarpien et stylo à rhumatisme), mais qui traitent une seule action spécifique (tenir un crayon, une cuillère...). Le développement d'un système d'aide à la préhension généralisé entièrement mécanique est donc bien justifié.
Analyse Fonctionnelle:
Diagramme bête à cornes :
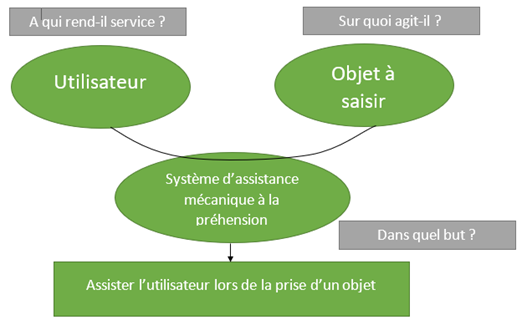
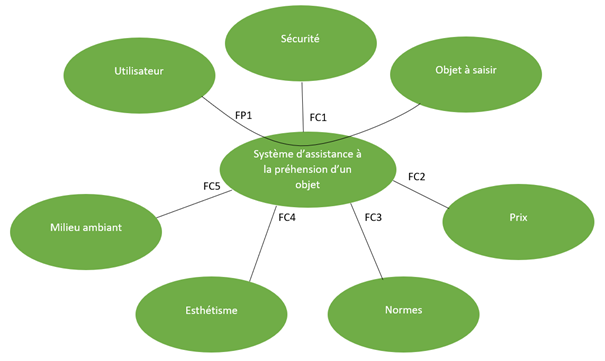
Diagramme pieuvre:
| FONCTION | PARAMETRES | INDICATIONS | FLEXIBILITE |
| FP1 : assister la saisie d’un objet |
- Masse maximale de l’objet à saisir - Dimensions maximales de l’objet à saisir - Doigts pris en compte |
- 1 (kg)
- Longueur = 16 (cm) - Largeur = 10 (cm)
-Minimum de 3 |
F0
F0
F0 |
| FC1 : Permettre une utilisation sécurisée | - Eviter les arrêtes dures ou les possibilités de pincement de la peau (tout le système) | - / | F0 |
| FC2 : Être accessible financièrement | -Prix maximal de commercialisation | - 100 € | F1 |
| FC3 : respecter / s’adapter aux normes en vigueur (réalisation / aspect humain) |
- Norme mécanique - Norme sur le handicap - Matériau utilisé |
Respect total sans limitation - Norme AC Z68-800
- ABS ou matériau non nocif à l’utilisateur (inoxydable, ignifugé, etc) |
F0
F0 |
| FC4 : être agréable à l’œil de l’utilisateur |
- Couleur - Formes |
- / |
F2 F2 |
|
FC5 : être le moins volumineux possible Être ergonomique |
- Masse du système en pratique - Volume du système par rapport à la main de l’utilisateur |
- 2 à 5 (kg) - moins de 40 % du volume de la main |
F0 F2 |
Développement du système:
Première ébauche du système: Schéma final du système prévu après CREO et plusieurs essais à l'imprimante 3D:


Le système d'exosquelette pour main final est scindé en trois sous-systèmes: un mécanisme de préhension des doigts, une manivelle permettant à l'utilisateur d'activer et ajuster ce ce premier sous-sytème et un bracelet servant de fixation à la manivelle. Un quatrième sous-système serait celui du pouce, que nous ne nous sommes pas penchés pour des raisons citées dans les problèpmes rencontrés. Les descriptions des trois premières sous-parties sont présentées ci-dessous.
Mécanisme principal de préhension:
Pour le mécanisme d'actionnement ou préhension des deux doigts (index et majeur), l'idée est d'utiliser un assemblage de biellette par liaison pivot, afin de produire un mouvement de rotation vers le bas, permettant ainsi l'articulation des doigts de l'utilisateur. Cette solution nécessite la mesure de côtes sur les doigts de l'utilisateur, afin de concevoir les bagues de fixation, qui seront liées au mécanisme pour faciliter la rotation. L'ensemble des pièces, à savoir les biellettes, les fixations et les cylindres de liaison assurants les liaisons pivot sera réalisé au moyen de l'imprimante 3D disponible au FabLab.

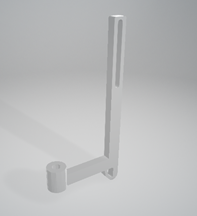
Manivelle:
Le mécanisme principal nécessite d'être poussé en translation pour être fonctionnel, mais doit aussi pouvoir rester bloqué dans de différentes positions pour plus de précision. Nous avons d'abord cherché différentes solutions afin de remédier à ce problème: des systèmes de crantage, clipsage et une manivelle hélicoïdale. La solution retenue est cette dernière.
La manivelle, quant à elle, est basée sur un système à liaison hélicoïdale. Ceci permet à l'utilisateur, à l'aide d'une simple rotation du bras, de réaliser une translation avec réglage de l'angle de fermeture des doigts. En effet, une translation simple ne permettrait pas au mécanisme de rester bloqué en position une fois la manivelle lachée, ce qui est un gros soucis pour la saisie des objets (FP1). La liaison hélicoïdale, elle, assure l'isostatisme de la pièce une fois lachée. On réalise ce sous-mécanisme à l'aide d'une vis au bout de laquelle se trouve un anneau. En passant ses doigts dans l'anneau et en exerçant une rotation, l'utilisateur entraîne le mouvement de la vis dans un cylindre taraudé fixé au poignet et pousse le mécanisme de préhension des doigts petit à petit. On réalise également ce sytème à l'aide de l'imprimante 3D.

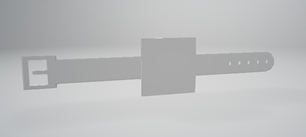
Bracelet
Le bracelet a été imaginé semblable à un classique bracelet de montre. Idéalement, il serait en matière flexible, ce qui permettrait à l'utilisateur de le régler à sa taille de poignet. Une partie liaison permet de fixer la manivelle au bracelet, ce qui assure le mouvement en translation de la vis par rapport à la main. En effet, sans ce bracelet relié au cylindre dans lequel translate et pivote la vis, la manivelle ne serait fixée nulle part et n'aurait aucune utilité.
Pouce
Nous avions également réfléchi à un système impliquant le pouce, ce qui aurait permis de réaliser complétement la fonction FP1. La question était de savoir si le pouce devait, lui aussi, être mobile (ce qui aurait compliqué grandement son maintien en position et donc la possibilité de saisir des objets) ou de le maintenir dans une position fixe afin d'assurer la stabilité de la saisie. Pour la pièce mobile, nous avions réfléchi à introduire un deuxième levier permettant de contrôler l'avance du pouce. Pour la pièce fixe, nous pensions simplement à relier une plaque attachée au pouce au bracelet fixe, un peu comme une atèle, ce qui permettrait de garder le pouce dans une position constante. Ces deux solutions ont leurs inconvénients. La première est complexe a réaliser la deuxième, tout en étant beaucoup plus simple, est tout de même compliquée et inconfortable pour l'utilisateur.
EVOLUTION DU PROTOTYPE ET PROBLEMES RENCONTRES
Comme indiqué précédemment en étude préliminaire, nous avons réalisé nos pièces à l'imprimante 3D, en matière plastique. Cependant, lors de cette phase de réalisation, nous nous sommes heurtés à plusieurs problèmes. Dans cette partie, nous les détaillerons et indiquerons les moyens mis en oeuvre pour les résoudre.
Mécanisme de préhension
Le premier problème rencontré traitait de la conception 3D : en effet, nous avons préalablement conçu le mécanisme de bielles en utilisant des côtes erronées : l'épaisseur des pièces était de l'ordre de 4 mm, et le lien avec la pièce réelle n'était pas percevable avec le modèle CAO uniquement. En les réalisations nous nous sommes alors aperçus que cette épaisseur était trop faible, ce qui, à long terme, risquait de compromettre l'intégrité physique et le bon fonctionnement du système. Nous avons traité le problème en relançant une production de pièces, avec les cotes augmentées. Sur le modèle réel, l'épaisseur ajustée permet ainsi de permettre une rigidité constante, et de limiter les dégats éventuels (chutes, chocs, erreur de manipulation). De plus, nous nous sommes rendus compte que les pièces cylindriques nécessitaient d'être filetées et que des pièces écrous devaient être développées pour que le système ne se désemboîte pas pendant l'utilisation. Une solution plus simple était de prendre des vis et écrous adaptés aux cotes de notre système à la PFM. Par manque de temps, nous avons décidé d'adopter cette solution pour se concentrer sur les autres fonctions.



Manivelle
Ce système étant équipé d'une longue vis (qui n'existe pas à la PFM), nous avons dû effectuer un filetage et un taraudage sur CREO. Malheureusement, le rendu à l'imprimante 3D n'était pas du tout satisfaisant et le filetage/taraudage quasi inexistant. Il nous a donc fallu tarauder et fileter les pièces à l'aide des outils de la PFM. Là aussi, nous avons rencontré des difficultés. En effet, nous avions pris un diamètre de 7 mm pour la pièce mâle et la pièce femelle. Or, comme on réalise un enlèvement de matière, la vis tournait dans le vide et la liaison hélicoïdale était un échec. Nous avons donc dû réimprimer les pièces avec les bonnes dimensions. De plus, les pièces étant en plastique, la vis a tendance à onduler et rend la liaison hélicoïdale moins fluide. Nous avons cependant été soigneux et cette ondulation n'empêche pas le fonctionnement global de la manivelle.


Bracelet et pièce de liaison
Après avoir développé un bracelet sur CREO, nous l'avons imprimé sur une machine spécialisée dans les matériaux souples. Malheureusement, celles-ci n'étaient pas assez performantes pour une telle pièce. En effet, le bracelet que nous avions conçu s'est immédiatement brisé après une simple flexion. Nous nous sommes alors trouvés dans une impasse.

On nous a alors recommandé de commander un bracelet sur Amazon, qu'on reliera au système par d'autres moyens. Entretemps, nous avons également réalisé par sécurité un deuxième bracelet rigide directement soudé à la pièce cylindrique de la manivelle, mais cette fois-ci déjà de forme arrondie pour éviter la casse et ouvert en bas pour introduire le poignet. Cette même pièce de liaison a été réalisée une deuxième fois avec un trou aux dimensions du bracelet commandé sur Amazon à la place du bracelet en ABS, aux. Comme nous ne nous attendions pas à ce que le bracelet souple ne soit pas réalisable, et que suite à cela l'imprimante 3D était indisponible dans les jours suivants (déjà en route pour les pièces d'un autre groupe, FabLab fermé, ou manque de matière), nous avons manqué de temps. C'est pourquoi la réalisation de ces deux exemplaires a été jugée nécessaire par sécurité, et nous ne pourrons observer les résultats qu'à partir de lundi, si nos pièces sont bien lancées.
Pièce de liaison avec bracelet en ABS: Pièce de liaison entre la vis et le bracelet commandé:

Pour les deux pièces, on fait passer la vis en plastique de la manivelle dans le cylindre qui, elle, sera reliée à la partie supérieure du mécanisme principal de préhension. On fait passer la partie inférieure (vis inférieure) du mécanisme principal dans la poche située sous le cylindre afin qu'il reste fixé au reste du système.
La première pièce comporte un bracelet un ABS qui constitue la partie fixe du système.
La deuxième pièce est trouée afin de pouvoir accueillir le bracelet commandé sur Amazon. Elle constitue elle aussi la partie fixe du système.
Pouce
Nous avons réalisé une pièce d'essai pour le pouce qui n'était pas fonctionnelle s'est cassée rapidement. En raison du grand nombre de problèmes rencontrés et du manque de temps, nous n'avons pas pu nous pencher plus sur la réalisation de ce système. Notre système reste donc incomplet, mais le plus gros du projet est fonctionnel.

CONCLUSION
L'idée de l'exosquelette nous est venue pour les différentes raisons citées en introduction, mais ce qui la rend spéciale est le fait qu'un tel système n'existe pas sur le marché (cf analyse de l'existant). Peut-être qu'avec plus de moyens, de temps et de connaissances, l'idée serait commercialisable.
Nous avons été ambitieux et avons voulu réaliser un porjet d'une grande complexité. En effet, la main est probablement un des organes les moins simples à étudier du fait du grand nombres de degrés de libertés dans les doigts et les poignets, ce qui explique le très haut coût des mécanismes d'exosquelettes existant. Bien qu'ayant déjà grandement simplifié la structure du système, il nous a fallu le simplifier encore pour ne se concentrer que sur le préhension de l'indexe et du majeur. La réalisation complète d'un tel projet aurait nécessité beaucoup plus de temps et de moyens. En effet, les problèmes se sont amoncelés durant la réalisation du prototype. Plus de la moitié du temps, l'imprimante 3D était indisponible (autres projets en cours d'impression, absence de matière, FabLab fermé...), et il nous fallait attendre le lendemain. Placer les pièces dans l'étuve nous faisait également perdre une journée, et à plusieurs reprises nous n'avons pas retrouvé les pièces que nous y avions laissées. La machine traitant les matières souples s'est averée indadaptée au bracelet conçu, et il nous a fallu attendre la livraison d'un bracelet. A cela s'ajoute le confinement, qui noius a fait perdre beaucoup de temps, car nous n'étions pas en mesure de nous retrouver ensemble pour tester le mécanisme et l'impression des pièces était beaucoup plus compliquée. En effet, pour travailler sur un projet mécanique, il est beaucoup plus simple d'être en présentiel qu'en distanciel. Pour toutes ces raisons, nous avons dû nous résigner à se concentrer sur les 3 sous-projets décrits ci-dessus.
Cependant, travailler sur un tel système nous a permis de beaucoup progresser. Nous avons tous touché au logiciel CREO, malgré les écarts de niveau. En effet, certains avaient déjà beaucoup d'expérience en raison d'anciens projets, et d'autres maîtisaient très peu le logiciel avant le projet, mais il a fallu se répartir les tâches afin de pouvoir avancer correctement. Manipuler une imprimante 3D fait désormais également partie de nos connaissances. Nous avons également appris différentes propriétés comme les exigences de diamètre pour le filetage/taraudage, la capacité des machines du FabLab (matière élastique), et, de manière générale, à bien réfléchir aux liaisons et dimensionnement des pièces. Au final, malgré les nombreux problèmes rencontrés, nous sommes satisfaits d'en avoir surmonté une grande partie et d'avoir réalisé la majorité des sous-projets avec succès. Cette expérience a été enrichissante et nous servira sans aucun doute dans nos prochains projets.
Auteurs : Exosquelette pour main lowcost

KOCH Simon
PL3 - 2022 - Exosquelette pour main lowcost Etui à Lunettes Support Nomade Casque - Téléphone
Galpern Maxime
PL3 - 2022 - Exosquelette pour main lowcost Etui à Lunettes Lattice Auxetique
Schlienger Aude
PL2 - 2020 - Exosquelette pour main lowcost
Behaghel Thaïs
PL2 - 2020 - Exosquelette pour main lowcost